A FET Proactive Horizon 2020 funded research project

The perceptual shaping of anticipatory actions
Forums:
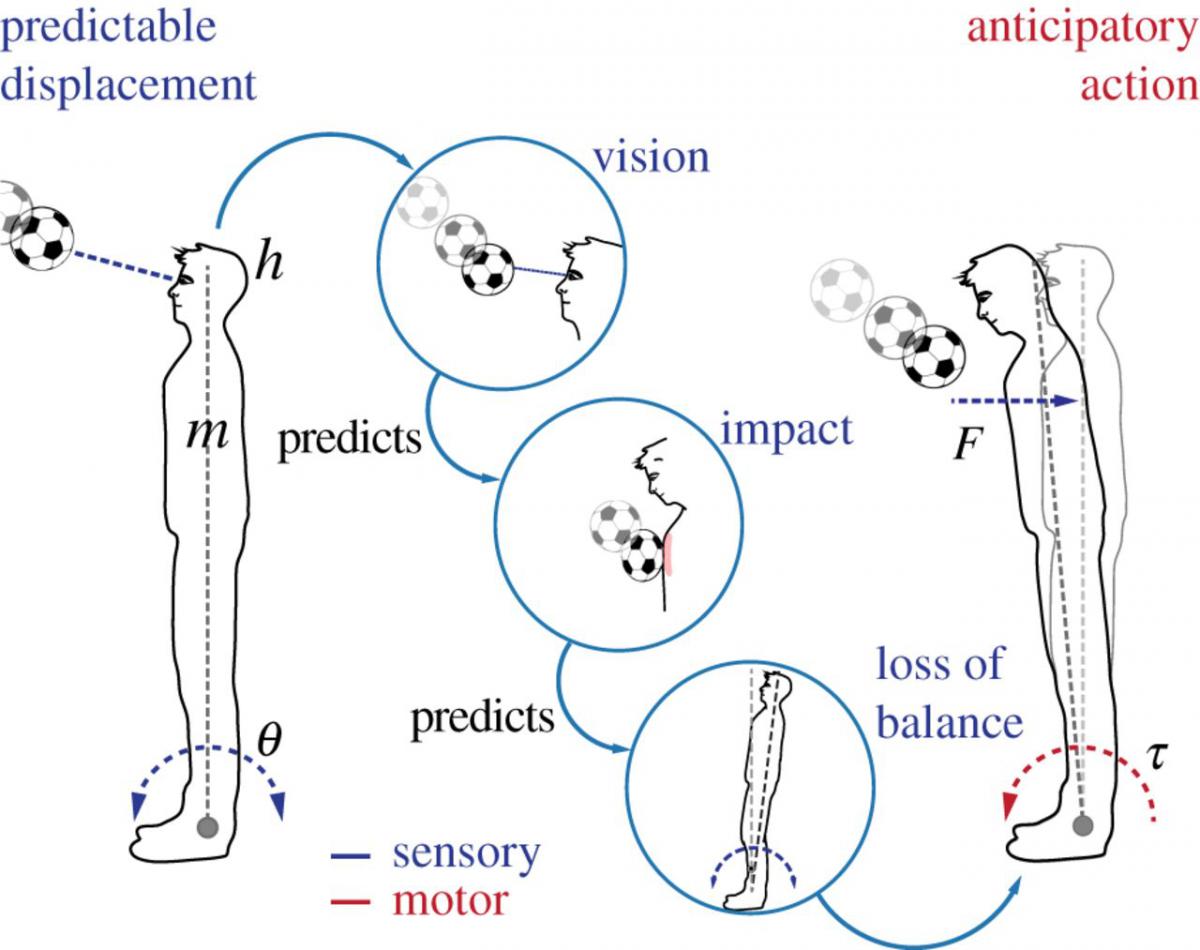 Humans display anticipatory motor responses to minimize the adverse effects of predictable perturbations. A widely accepted explanation for this behavior relies on the notion of an inverse model that, learning from motor errors, anticipates corrective responses. Here, we propose and validate the alternative hypothesis that anticipatory control can be realized through a cascade of purely sensory predictions that drive the motor system, reflecting the causal sequence of the perceptual events preceding the error. We compare both hypotheses in a simulated anticipatory postural adjustment task. We observe that adaptation in the sensory domain, but not in the motor
Humans display anticipatory motor responses to minimize the adverse effects of predictable perturbations. A widely accepted explanation for this behavior relies on the notion of an inverse model that, learning from motor errors, anticipates corrective responses. Here, we propose and validate the alternative hypothesis that anticipatory control can be realized through a cascade of purely sensory predictions that drive the motor system, reflecting the causal sequence of the perceptual events preceding the error. We compare both hypotheses in a simulated anticipatory postural adjustment task. We observe that adaptation in the sensory domain, but not in the motor
one, supports the robust and generalizable anticipatory control characteristic of biological systems. Our proposal unites the neurobiology of the cerebellum with the theory of active inference and provides a concrete implementation of its core tenets with great relevance both to our
understanding of biological control systems and, possibly, to their emulation in complex artefacts.