Submitted by alex on Tue, 04/17/2018 - 13:57
Submitted by alex on Mon, 04/09/2018 - 09:48
Submitted by alex on Mon, 04/09/2018 - 09:41
Submitted by alex on Mon, 02/12/2018 - 13:30
Submitted by alex on Thu, 01/18/2018 - 10:48
Submitted by alex on Mon, 01/08/2018 - 14:01
Submitted by alex on Wed, 11/01/2017 - 09:37
Submitted by alex on Tue, 09/26/2017 - 14:23
Submitted by alex on Tue, 09/26/2017 - 14:22
Submitted by alex on Mon, 09/11/2017 - 10:02
Pages


 When scanning a visual scene, we are in a constant decision process regar
When scanning a visual scene, we are in a constant decision process regar Due to the necessity of implementing moral decisions in autonomous driving vehicles
Due to the necessity of implementing moral decisions in autonomous driving vehicles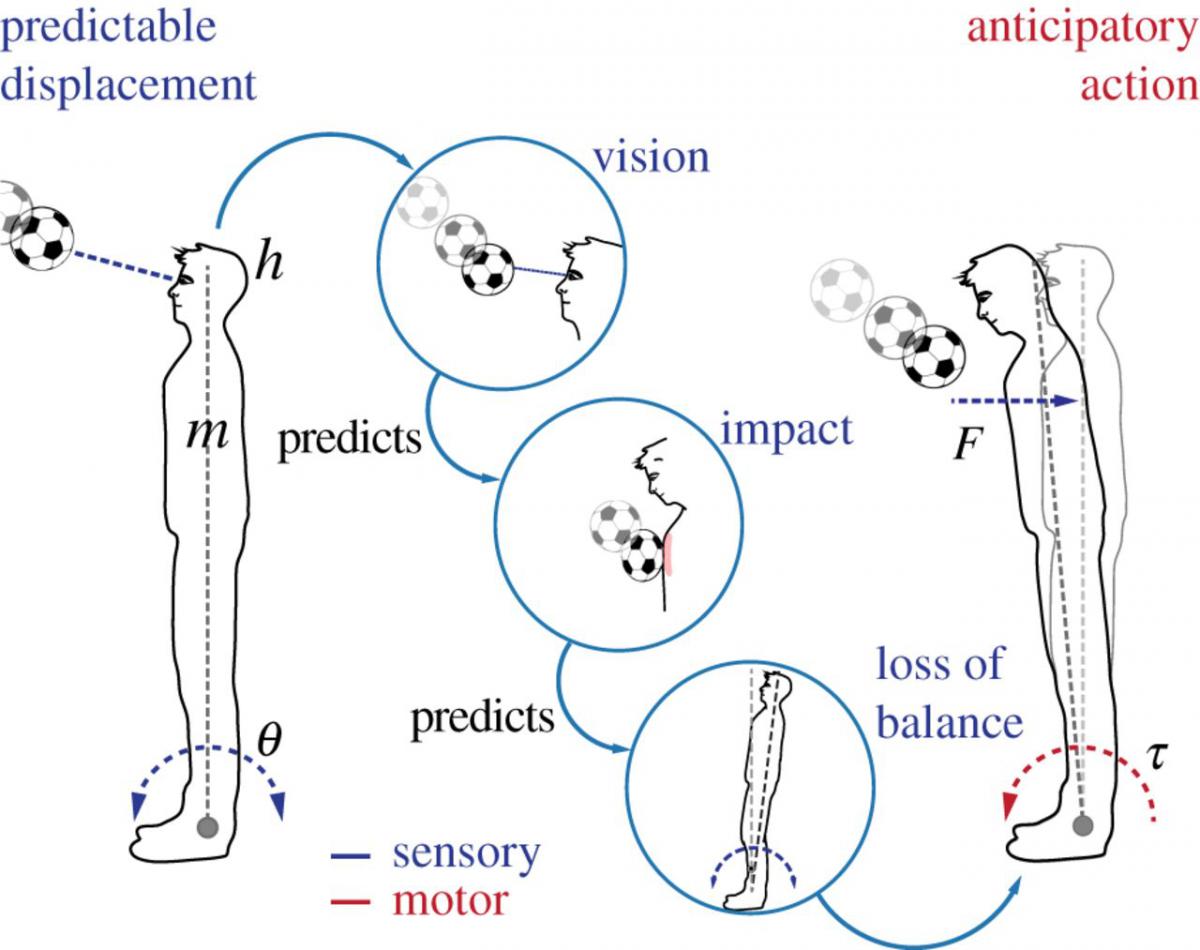 Humans display anticipatory motor responses to minimize the adverse effects of predictable
Humans display anticipatory motor responses to minimize the adverse effects of predictable  Humans are bombarded with visual input – yet, their attentional capacities for proc
Humans are bombarded with visual input – yet, their attentional capacities for proc